Functionality of the intersection assistant – what’s behind it
Once we have developed a function, this does not automatically mean that the work is finished and the issue is closed. On the contrary, the vehicles and the technology continue to evolve. That means the functions must be kept up-to-date at all times, including carrying out and implementing minor adjustments or extensions.
The intersection assistant we developed also faced further development phases for vehicles with an advanced central driver assistance control unit. Alex and his team then proceeded to work on the corresponding system development, software implementation and validation across the entire V-model in accordance with the Automotive SPICE standard. Their activities included working on the specification at all levels in Doors and carrying out model-based software development with Matlab-Simulink and dSpace Targetlink. To perform validation at the software and system levels, they utilized commercial tools (COTS) such as Matlab-Simulink, Vector Toolchain and ADTF, in addition to in-house developed tools, especially for verifying the performance of the function. After the final validation in the vehicle on the testing grounds, they were able to make a release recommendation.
We’d like to use the opportunity with this last release recommendation to dig deeper in the intersection assistant. What lies behind the function and how does it really work in real road environments?
The goal is to minimize the risk of accidents in cross-traffic areas.
The complexity of the functional logic lies in the fact that the function must detect early enough whether the approaching cross-traffic (i.e. because of the driving direction) could lead to a collision situation. If a collision is imminent, the function must warn the driver in good time. If the assistant were to miscalculate the situation, it could prompt an unnecessary and disruptive action, such as if it triggers a warning, although the cross-traffic is making a turn, thus eliminating the threat of a collision.
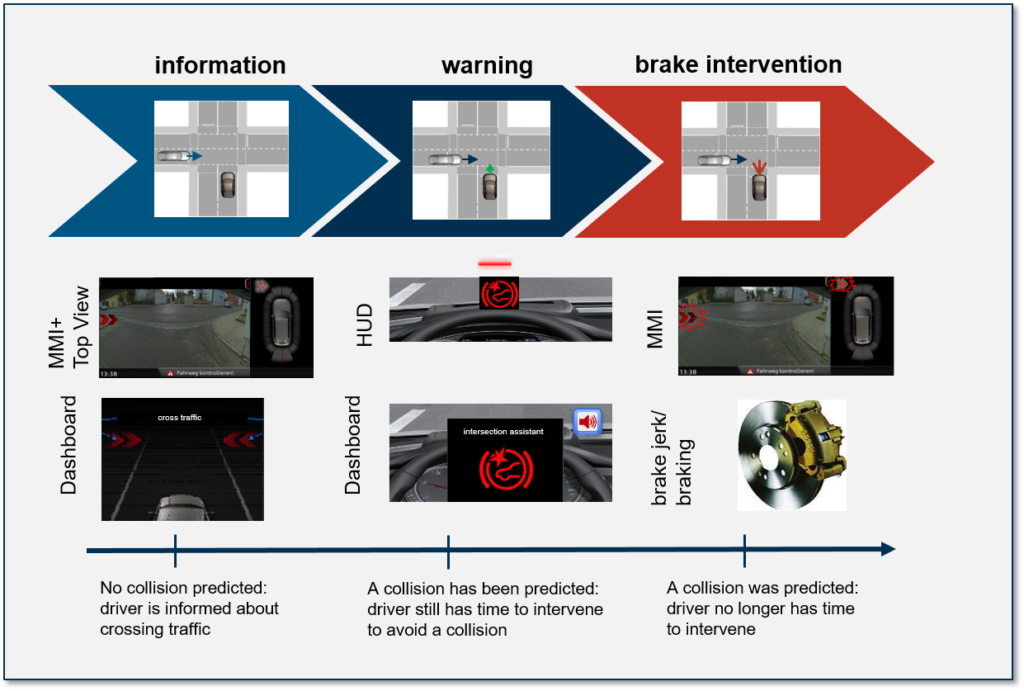
The intersection assistant software runs on the central driver assistance control unit. This enables direct access to all of the required data, such as the fused object information from the vehicle sensors (radar, cameras, laser scanners). After this data is processed, a corresponding action can be carried out:
- generating optical information when detecting the cross-traffic in the front area
- generating an optical and acoustic warning when the ego vehicle speed is equal to or less than 30 km/h amid the threat of a collision that can still be avoided by the driver
- triggering of a short brake jerk or full braking when the speed of the ego vehicle is equal to or less than 10 km/h amid the threat of a collision that can’t be avoided by the driver